To make the repairs I needed to figure out what I was dealing with. The case said “Remington Rand” but I had problems finding the serial number. I finally found the serial number on the right side of the frame under the carriage rail:
J1391378

The back pops up easily if you pry it gently from the top

It took me forever to find the serial number
Fortunately, there is an online database of serial numbers for typewriters here:
http://typewriterdatabase.com/remington.227.typewriter-serial-number-database
With this information, I was able to identify the year and model. I had a 1948 Remington Rand KMC. This typewriter features the KMC key – Keyboard Margin Control. I found a very informative blog post in which the author Richard Polt had a type-off between the KMC and a similar Royal:
http://writingball.blogspot.com/2013/06/kmc-vs-kmm.html
Obviously we had a winner.
Diagram of Remington Rand KMC found here.

This is the right “KMC” key.

Thanks for sharing where to find the serial number. I never would have found it otherwise. I didn’t know that that back plate comes off.
LikeLike
I am happy to have helped – that was a tricky serial number to find.
LikeLike
Hi, I found the serial number for my Remington Rand, it is JT1012390…. i can’t find this serial in any database… any thoughts please? It is a wide carriage.. but i’d like to find the model and year and any information/history on this machine. Thanks so much.
LikeLike
Hi Jerry – If you have something like what I have, you probably have a No. 17 or KMC from 1946. I went to the Remington serial number page at Typewriter Database:
http://typewriterdatabase.com/remington.42.typewriter-serial-number-database
And scrolled down a bit on the page:
Your typewriter may look a lot like Richard Polt’s (except yours is wide carriage):
http://typewriterdatabase.com/1946-remington-kmc.1322.typewriter
Richard Polt’s has a “JT” prefix in the serial number as well , and he theorizes that the “JT” prefix may be be related to the tabulator.
LikeLike
Thanks so much for the info… yes it is quite like yours and Richard Polt’s. However, both your typewriters have the smooth single colored keys while mine have the silver frame around them… Also, yours has that long tray-like key under the Remington, mine doesn’t and both Richard’s and yours have two extra keys (Richard has one that says KMC, yours says TM?, and a similar one on the opposite side) which mine doesn’t have…. I don’t know if it is relevant, mine is in spanish. Would you know if these slight differences would indicate a different model or year? Thank you so much for your help 🙂
LikeLike
It sounds like you have a Remington Model 17 which was the predecessor of the KMC. The KMC has weirdly shaped “KMC” keys on either side of the keyboard and were used for Keyboard Margin Control. Richard Polt and I have KMCs – my KMC has a defaced KMC key on the left.
Here’s a picture of a Model 17 with silver-ringed keys in the TWDB – it’s very handsome:
Remington Model 17
The long bar under the word “Remington” is the tab bar. Here is a diagram of the typewriter that might be useful to you:
LikeLike
Awesome, it is a close match. Still, mine has no tab bar nor KMC keys (which do appear on the 17 diagram). Does DOEHLER 2-41024 mean anything regarding date and model? So, up to now it is Standard no.17 (1946) right? Thanks so much… this info is going to be published in a book on my art work, that’s why im trying to be thorough.
LikeLike
I apologize for being unclear – I should have said that the diagram was of a KMC (thus the KMC buttons).
I do not know the significance of DOEHLER 2-4102, but I googled “DOEHLER typewriter” and found other Remingtons on eBay with “DOEHLER” stamped on them.
I do believe that you have a 1946 Remington Standard Model 17. Here are some pictures at Typewriter Database of other Model 17 typewriters:
http://typewriterdatabase.com/Remington.17.42.bmys
LikeLike
Can you help I camt find the year for this Remington Rand Deluxe Model 5 Portable Typwriter w/Case # B1583994
LikeLike
Barbara – I went to Typewriter Database and the Remington serial number page. Under the section for “Deluxe Model 5” here:
https://typewriterdatabase.com/remington.42.typewriter-serial-number-database#po_14
I see a listing. It looks like your Deluxe Model 5 was made in March of 1948 (serial numbers for 03/1948 started at B1563354.)
LikeLike
I have remington rand KMC J1230821…
LikeLike
Sounds like yours is a 1947 KMC.
I love my KMC – such a reliable and satisfying typewriter – I just used it today. It’s as solid as a rock and one of my very favorites.
LikeLike
Can you help with mine? Cant find the year for this on any sites I’m seeing 😦 Remington Rand Deluxe Model 5 Portable Typwriter w/Case # B1583994
LikeLike
Barbara – I went to Typewriter Database and the Remington serial number page. Under the section for “Deluxe Model 5” here:
https://typewriterdatabase.com/remington.42.typewriter-serial-number-database#po_14
I see a listing. It looks like your Deluxe Model 5 was made in March of 1948 (serial numbers for 03/1948 started at B1563354.)
LikeLike
Please help me identify my Remington typewriter serial #S244910. Thanks.
LikeLike
Hm – if it’s a Remington Junior (4-Bank) then I would say it’s a 1937 typewriter. Does it look like this?
http://typewriterdatabase.com/1938-remington-junior.4359.typewriter
Typewriter Database (http://typewriterdatabase.com/remington.42.typewriter-serial-number-database) has pictures and serial number listings. It is a wonderful resource.
LikeLike
Yes this looks very similar, but “Remington is above the 6i and 7 keys, on top of the case. I wish I knew how to attach a photo.
LikeLike
So that’s what you’ve sent – beautiful typewriter. At this point, I would have to peruse the beauties at Typewriter Database to be certain what you have there. I think it’s a Remington Junior by serial number. Interesting that “Remington” is above the 6 &7 and not on the paper table.
LikeLike
Sorry to bother but I cant seem to find J1473490 on the id page, anyone help?
LikeLike
When I go to the Remington serial number page at Typewriter Database here:
http://typewriterdatabase.com/remington.42.typewriter-serial-number-database
I see that J1473490 falls in the 1948 range – probably from September 1948:
September 1948 started with J1468408 and October 1948 started with J1488678
LikeLike
Thank you very much, nice page. I might have to do some repairs, the caps lock keys are limp on mine! Ill have to see where to start
LikeLike
If the shift lock is limp, you may be missing a small spring between the shift and shift lock. Here is the spring on my KMC:
LikeLike
Can’t find what year mine is. Found these numbers BT1652382. Any help would be appreciated.
LikeLike
Is it a Remington KMC like mine, a big standard? At Typewriter Database, I see portables with the “BT” prefix:
http://typewriterdatabase.com/remington.42.typewriter-serial-number-database
LikeLike
Did you discover how to remove the Unit from the base on J and EJ Models
2
LikeLike
I haven’t done this before to my KMC. It sounds a bit involved. There are detailed instructions for a Remington #17 in the Ames Technical Manual at http://site.xavier.edu/polt/typewriters/tw-manuals.html (service manual downloads are at the bottom of the page – this is a large file). Here are the instructions in HTML (without the diagram):
http://maritime.org/doc/typewriter/
LikeLike
Are you asking about a tear down involving removing the outer shell? It would be the same on both models. What parts are you wanting to get at? Getting the shell off of one of these critters will involve a pretty major tear down of the whole machine. First, after removing the top and back, you’ll have to remove the cross member below, the four bolts that hold on the back, and to make the whole thing really interesting, the carriage will have to come off. Be sure to secure the spring drum drawband to the plate which will come off later–along with the spring drum itself. You’ll have the machine torn down into six major pieces. After you have found what you were after, you’ll have fun getting her buttoned back up. Long story short, chances are, you might be able to get what you’re after without having to go through all this rigmorole. Take it from a guy who’s been down this rocky road a time or two. Chances are, not knowing what’s wrong with your machine, it might need a bit of cleaning, or a slight adjustment that can be accomplished from underneath, or better yet, from the back or the top.
LikeLike
I’m Nienke Laane, I live in the Netherlands. I want to ask you what you think of this typewriter. Remington Star nr. 11. I would like to sent a foto but I don’t know how. Looking forward to your reaction. My email is: .
LikeLike
Hi Nienke – I’d love to see your Remington 11. Perhaps you can post to a photo sharing service or you can email photos to me: maryech at g mail d ot c om.
LikeLike
I have a 1947 Remington KMC that was once used by the U. S. Army–Fort Hood, Texas to be exact. It has names carved on the insides of its top and its back–including one from December, 1947! I’m not ABOUT to part with that one–too much soul. I’m gonna use it ’till it runs out of ink.
LikeLike
I agree – my KMC is still one of my favorites.
LikeLike
i have a deluxe model 5 SN B1186431. Went on the database website but SN was not found. The closest SNs were those in the deluxe model 5 “1941 line” but none match mine. Am I reading this wrong or missing anything? Any info can help.
LikeLike
I think that you have a 1942 Deluxe Model 5 made sometime in January 1942. If you visit the Remington serial number page at Typewriter Database here:
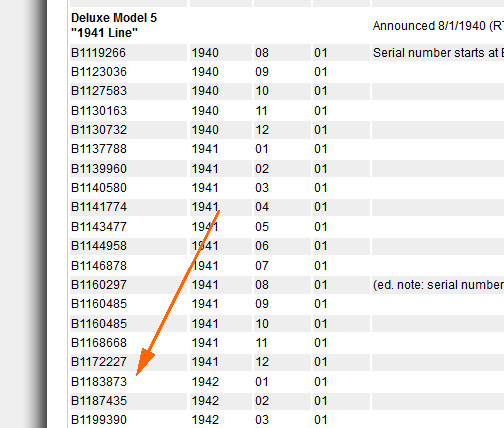
http://typewriterdatabase.com/remington.42.typewriter-serial-number-database
you’ll see this listing of serial number ranges:
You’ll see that January 1942 started with B1183873 and February 1942 started with B1187435. Your serial number (B1186431) falls right in the middle.
LikeLike
Thats exactly what i thought. Just wanting to confirm with someone more knowledgeable. thanks for replying
LikeLike
So glad that I could help.
LikeLike
I have e remigton rand model 1 no. serie P111115 what old is
LikeLike
I think it’s from 1937. When I visit the Remington Rand serial number page at Typewriter Database here:
http://typewriterdatabase.com/remington.227.typewriter-serial-number-database
I see that March of 1937 started with serial number P110159
LikeLike
hi can anyone help with my Remington standard typewriter the only number i can find is at the right side back of the carriage RE94938 and cant find anything else and nothing on the database
thanks
LikeLike
Hm. Could you send a picture of the typewriter to maryech at gmail dot com?
LikeLike
Hi, Thanks to your page I found out that my Remmington KMC sn J1023914 (with Belgian/French keys) was manufacturen in November 1946, just 7 months after my father was born :-).
LikeLike
I love fun coincidences like that! Enjoy your KMC (which is still one of my most satisfying typers).
LikeLike
hey i got and old typewriter issue is the serial number doesnt come up with anything its cj 531396 its aremingtong rand. short of that im unsure any help would be awesome also what ribbon do i use.
LikeLike
Congratulations on your Remington! Could you send a picture of the typewriter and serial number to maryech (at) gmail.com? I’ll help you research it.
I use 1/2″ ribbon. I have bought 1/2″ ribbon at Staples that worked just fine:

Here’s my post on changing the ribbon.
LikeLike
Hi! Just randomly ran across your page. In cleaning out an old house, I found a “Remington 5” portable typewriter. What a beauty, and in amazing condition! A couple of the keys were sticking so I threw on some sewing machine oil … figured that couldn’t hurt it, and it did help to loosen up. I don’t know anything about old typewriters, and wondering where to go for more info. I found the Typewriter Database, but I actually found two numbers on the machine (wow, that was hard, too!!) and don’t know which is the actual serial number. Would love to connect with someone who could tell me more about this cute little machine!
LikeLike
Hi Cyndi – Lucky you! I love those Remington portables. I cleaned up a Remington 5 up for a friend of a friend once:
https://myoldtypewriter.wordpress.com/category/remington-5/
The serial number is stamped on the front of the machine behind the back space key on the right.
Richard Polt has an amazing typewriter site:
http://site.xavier.edu/polt/typewriters/
with a whole page on Remington portables:
http://site.xavier.edu/polt/typewriters/rem-portables.htm
You can find old typewriter manuals on his site too:
http://site.xavier.edu/polt/typewriters/tw-manuals.html
He has a page on basic typewriter restoration:
http://site.xavier.edu/polt/typewriters/tw-restoration.html
but for more in-depth info, consider his book:
http://typewriterrevolution.com/
Good luck with your Remington 5 – what a find!
LikeLike
Oh wow! Okay, I knew there had to be a great community! What great resources, thank you! I have a number of vintage sewing machines, and I know where to reach out there, but this is new to me. My personal typewriter (that I haven’t used in years but I hold on to “just in case”) is a Smith Corona from the 80’s. This Remington is in amazing condition considering she’s nearly 81 years old, born in 1937. Paint is nice and glossy, no scratches to speak of, and only a little dirty inside — no rust or anything. Even the ribbon still prints, not strong, but enough to test with! Not bad for having been in an attic for who-knows-how-many-years. The case is good too, except for one latch that is damaged, and I love how the machine snaps into the base! At first I thought I’d give her up, but now I’m not so sure. After playing for a little while this afternoon, I’m becoming attached quickly. Although it’s funny, it’s been so long since I’ve used a manual keyboard that I broke 3 fingernails!! I forgot what that’s like, LOL!
So there’s another number stamped on the underside of the top cover, not the serial number. Do you have any idea what it signifies? It’s N13587-1. Serial number, where you describe, is V916437. It was really hard to find those without guidance, and I actually saw that “N” number first.
I really appreciate your guidance and help! Can’t wait to get her properly cleaned up!
LikeLike
So glad to be of help!
I am not sure what the second number on the underside of the top cover is. Factory code? Part number?
There is a huge typewriter community out there. The Facebook group is very active:
https://www.facebook.com/groups/TypewriterCollectors/
Many typewriter collectors like to blog. Visit Typosphere and check out latest postings (in the right column):
http://typosphere.blogspot.com/
LikeLike
Thank you so much! 🙂
LikeLike
Hi, I was wondering if someone could help me find my model of typewriter. I found the serial number but I can’t find it on the database. J635703
LikeLike
I can help. Send me a picture:

LikeLike
Hello Mary — The Serial Number that I have found on my vintage typewriter is J148715. So how would I determine the date of manufacturer?
LikeLike
Hi Kathy – I get my dates of manufacture from Typewriter Database. It looks like yours was built in November of 1939. I went to the Remington page at TWDB and scrolled down to the “Model Standard No. 17 and KMC” section. November of 1939 started with serial number J147829 and December began with J154365:
https://typewriterdatabase.com/remington.42.typewriter-serial-number-database
So – I think it was made some time in November of 1939.
LikeLike
Can you help me id my Remington Rand. Serial 743729. Is the first number 1917, 27, 37? The platen has a diameter of 1.496 so I believe it is a Quiet-Riter, Office-Riter. Is this all of the id info on this typewriter? I have not been able to find this number in the database. Thanks
LikeLike
Hi Grace – send me a picture of the typewriter and a close up photo of the serial number to my email:

I’ll take a look and help you identify the model and the year it was manufactured. Mary
LikeLike
What is the model for serial number SPP-2-51351-J
LikeLike
Sounds like a 1950s Remington Super-Riter (which has SPP-2-51351-J stamped on a bottom bar) though without pictures I can’t say for sure. Serial number on Super-Riters may be found under the carriage on the right side of the frame. Here are some pictures of Super-Riters:
https://typewriterdatabase.com/Remington.Super-Riter.42.bmys
LikeLike
Would you please help me identify my Remington 333 typewriter, serial # F9452403. Thank you
LikeLike
Beth – your Remington 333 is a Brother JP-1 and it was sold under a bazillion different names. Typewriter Database has a very good rule set for interpreting the serial number. It seems like yours was manufactured in June 1969 (if it has white keys):
https://typewriterdatabase.com/brother.10.typewriter-serial-number-database
Here is an another interesting post about the 333:
https://type-writer.org/?p=1280
Hope this helps!
LikeLike
Hey, love the site and the wealth of information it provides. I got an old typewriter. Remington, Serial number J120800-K. So its a model 17? from the database. Although looks like a super Riter from the pictures. Can you help ? I’d love to paint it !
Looks terribly beat up. But I love to use it.
LikeLike
Hello Harman – hurray for old Remingtons! It may be that you have a Remington Super Riter manufactured outside the United States. 1950s English, Dutch, French, South American Super Riters have a different numbering system and suffixes (see about one quarter – one half way down this page):

https://typewriterdatabase.com/remington.42.typewriter-serial-number-database
If you send me a picture, I can determine whether you are dealing with a 1950s Super Riter:
LikeLike
I just got a Remington Rand J1452746 I’m working order albeit dusty as heck.
thanks to you & the database seemed to figure it out. Manufactured July 1948 and has the KMC and I’m assuming only CAPS.
Now to figure out where to get parts / supplies / ribbons and write a letter !!
LikeLike
Congratulations on your Remington Rand! 1/2″ typewriter ribbons can be found easily online on eBay, Amazon, Etsy (eg this store https://www.etsy.com/shop/TypewriterStuff). You can also sometimes find them in office supply stores. I posted about putting new ribbon in my Remington – you may find it useful:
https://myoldtypewriter.com/2015/03/12/replacing-the-ribbon-on-my-remington-rand-typewriter/
LikeLike
Trying to find out what model my Remington Typerwriter is.
Serial:
S169315
Thanks!
-Taylor
LikeLike
Hi Taylor, It’s hard to say what model your Remington is without seeing it. Is it a small portable? There are Remington portables with the “S” prefix. You can also send a photo to me at

LikeLike
Hi – Great information – thank you! I am trying to find out what model my Remington Rand typewriter is that looks just like yours but has a serial number of J1380276. I didn’t find it on the typewriter database. Maybe I missed it. Can you please help?
Thank you.
Vivian
LikeLike
Hi Vivian, it looks like your Remington was made sometime in March of 1948. On the Remington serial number page (https://typewriterdatabase.com/remington.42.typewriter-serial-number-database), about a fifth of the way down, you’ll find serial numbers for Remington 17s and KMCs with associated years and months.
LikeLike